
😃 About Me
Currently, I am a Ph.D. student at the Laboratory of Field Phenomics at The University of Tokyo. I obtained my M.Eng. degree from College of Information and Electrical Engineering, China Agricultural University, where I work on automatic perception and navigation for agricultural robots, including object detection and tracking, zero-shot learning, LiDAR-camera panoramic fusion, etc. Before that, I obtained my B.Eng. degree from School of Mechanical Engineering, Guangxi University in June, 2021.
If you are seeking any form of academic cooperation, please feel free to email me at tianhai.wang@fieldphenomics.com.
Research interest: plant phenotyping, field robotics, and smart agriculture.
🔥 News
-
08/2025: I gave a presentation at the MLCAS2025 academic conference.
-
05/2025: I was selected to receive funding from Self-Directed and Integrated Project Research.
-
04/2025: I have joined Laboratory of Field Phenomics at The University of Tokyo as a Ph.D. student.
-
03/2025: My Google Scholar citations have exceeded 1000.
-
03/2025: I was selected to receive funding from SPRING GX Project.
-
02/2025: I have passed the entrance examination for IPADS PhD Program (SGU, only 2 admitted students per round) at The University of Tokyo.
🛠️ Current Research - Digital Twin and Virtual Reality for Orchard Robotics
The primary objective of this research is to develop a highly integrated autonomous field robot system capable of precision pruning in smart orchards, including machine vision system development, automatic navigation system development, and end-effector control system development.
Ultimately, we aim to achieve Embodied AI systems based on end-to-end Vision-Language-Action models.
At the beginning, we focus on constructing simulation environments for the training and testing of robots through Digital Twin and Virtual Reality, designing a 3D World Foundation Model for orchards, and providing a systematic and comprehensive benchmark dataset for the field of agricultural engineering.
Supervisor:
- Tenured Associate Professor Wei GUO
- Assistant Professor James BURRIDGE
Related Support:
- Kubota KATR All-terrain Platform Vehicle
- FJD TRION™ P1 LiDAR Scanner
- XGRIDS LixelKity K1 Compact Handheld 3D Scanner
- Various farmlands, orchards and greenhouses located at the Institute for Sustainable Agro-ecosystem Services
✅ Completed Researches
-
Multi-agent collaboration and obstacle avoidance system for wheat production
This work focuses on object detection and tracking based on multi-sensor fusion in unstructured farmland environment. Especially, I’m dedicated to realizing the detection of unknown objects in open environment via few/zero-shot learning, open set recognition, etc.
In addition, I participated in the development of multi-agent collaborative system as a main member. In this project, I am responsible for path planning and task allocation algorithms in the harvesting-unloading-transportation process of wheat production. According to constraints of plot location, task number, operation time window, and path planning, intelligent scheduling model was established based on non-dominated sorting genetic and colony algorithms.
Supervisor:
Object detection and tracking based on multi-sensor fusion
Fusion
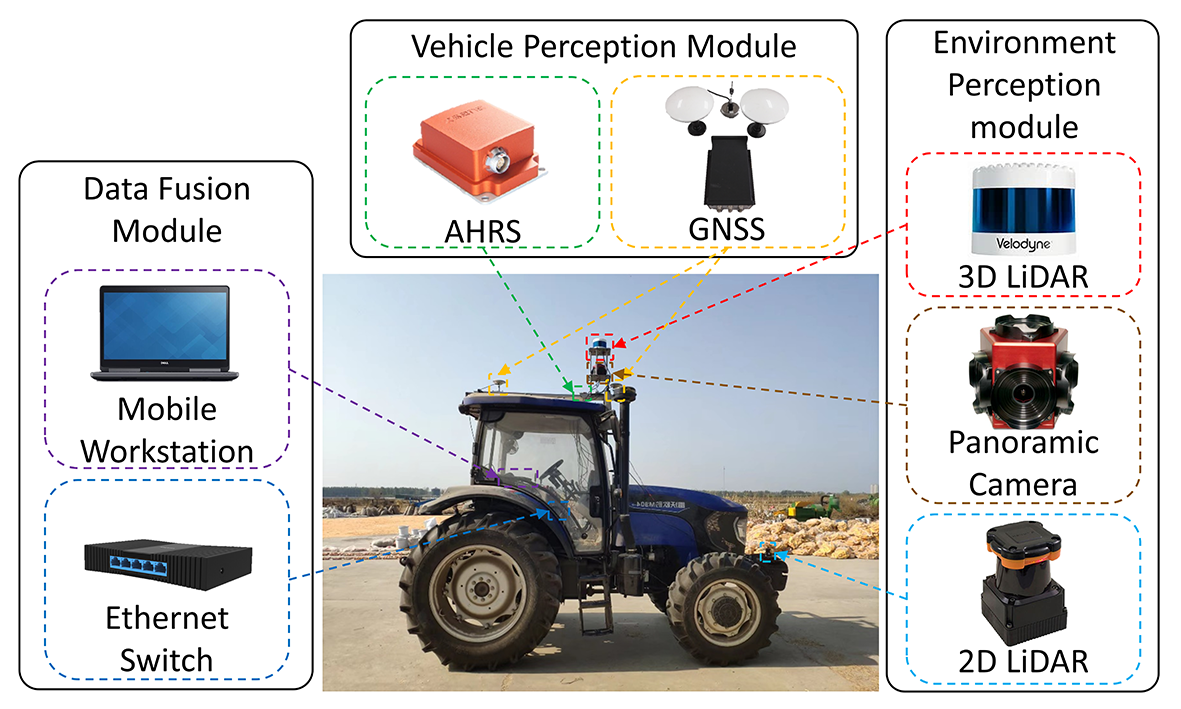
- AHRS: Xsens MTi series Attitude and Heading Reference Systems
- GNSS: CHCNAV series Global Navigation Satellite System
- 3D LiDAR: Velodyne Alpha Prime VLS-128 3D Light Detection and Ranging
- Panoramic Camera: FLIR Ladybug series panoramic camera
- 2D LiDAR: Hokuyo UTM-30LX 2D Light Detection and Ranging
Multi-agent collaborative system for agricultural production

-
Robot patrol based on Simultaneous Localization And Mapping (SLAM)
This robot is designed to perform random movement indoors and real-time object detection, which can check whether there are suspicious persons in the room. In this project, I am the team leader and mainly responsible for the development of 3D modeling, object detection, and Simultaneous Localization And Mapping (SLAM). In a ministerial-level innovation competition, our team won the second prize.
-
Robot grasping for fruit picking
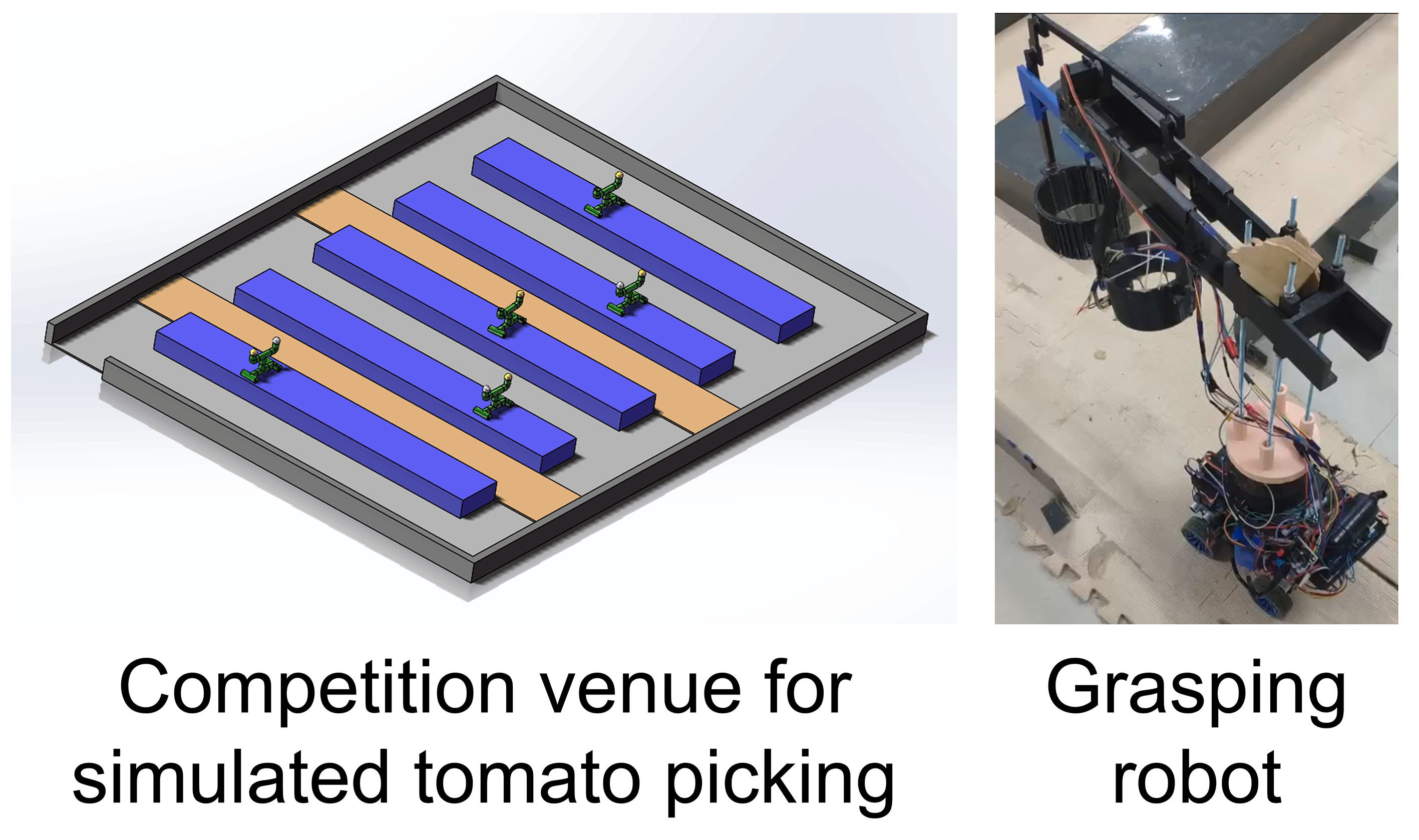
This robot is designed to pick simulated tomatoes through narrow roads. In terms of the hardware, I am responsible for mechanical design, 3D modeling and printing of robot chassis and actuators. With regard to the software, I mainly research perception-motion coordinated control algorithm.
-
Grasping and quadruped robots
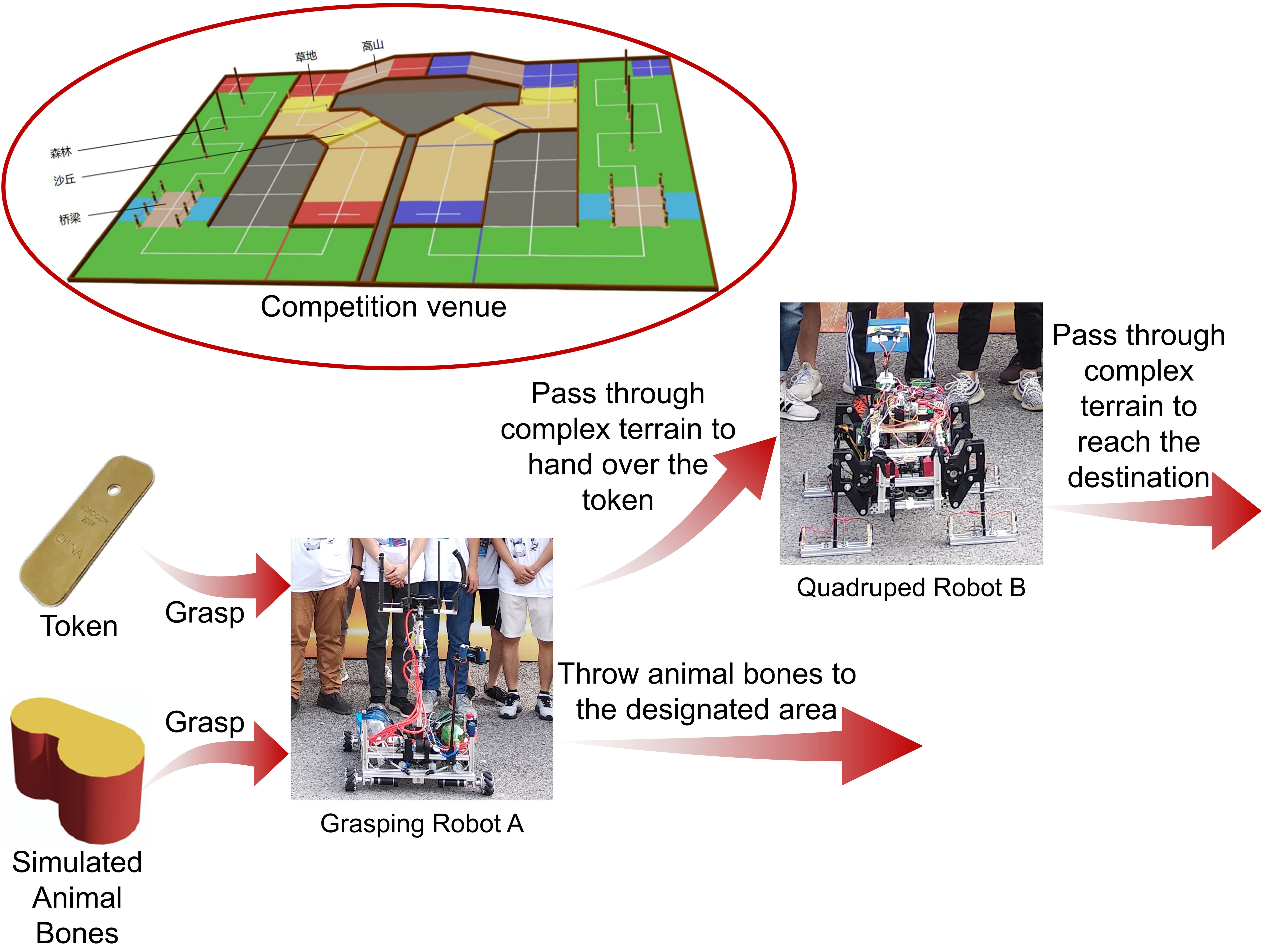
These robots are designed according to the rules of a national-level innovation competition. In this project, I am the team leader and mainly responsible for the arm control of the grasping robot and the inverse kinematics analysis of the quadruped robot. In this national-level innovation competition, our team won the third prize.
-
Corn morphology detection and distribution machine
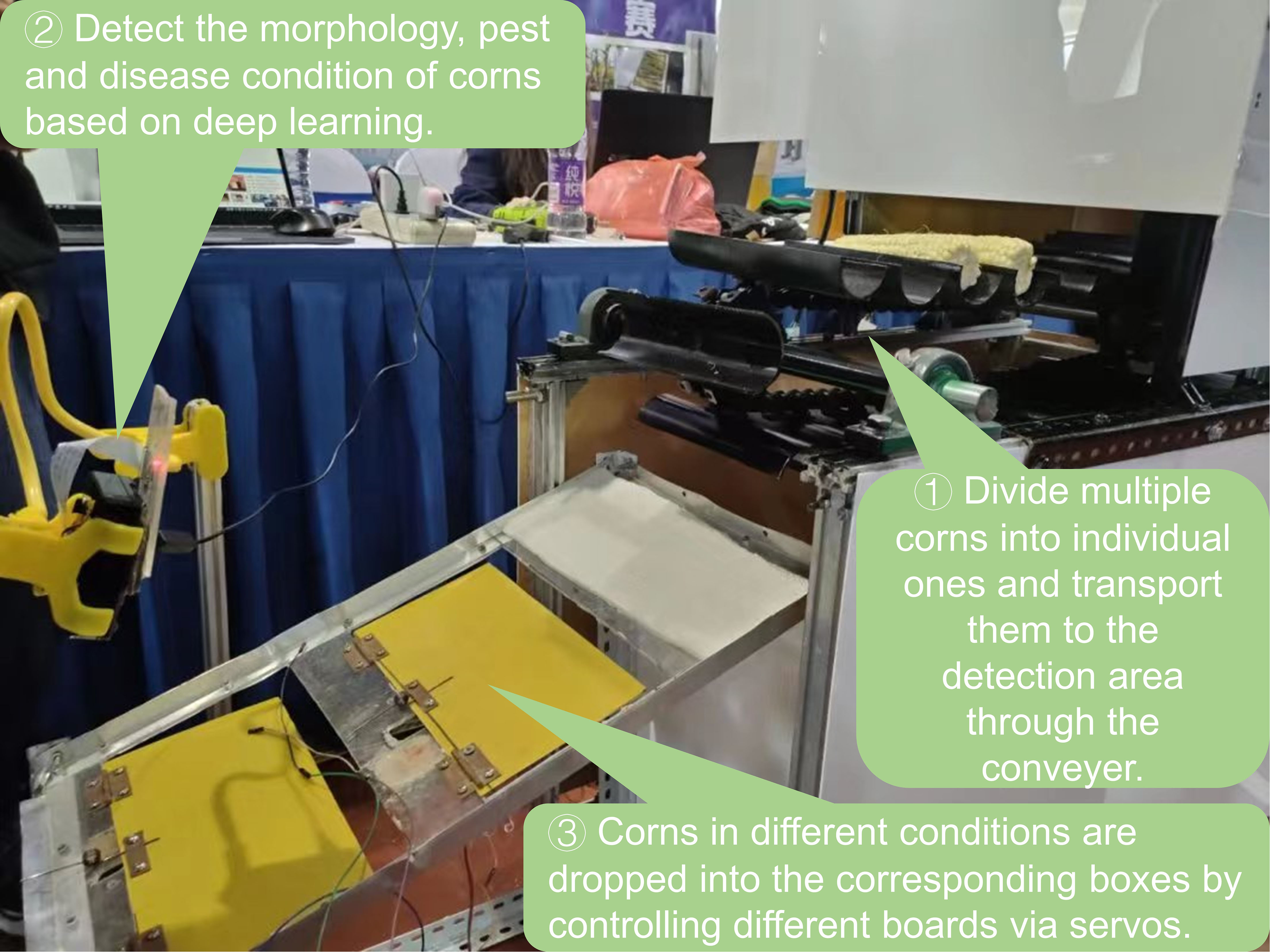
This machine is designed for automatic distribution of corns according to their morphology as well as pest and disease conditions. In this project, I am the team leader and mainly responsible for corn detection, servo control, and their coordination. In a national-level innovation competition, our team won the second prize.
-
Remote sensing based on Unmanned Aerial Vehicle (UAV)
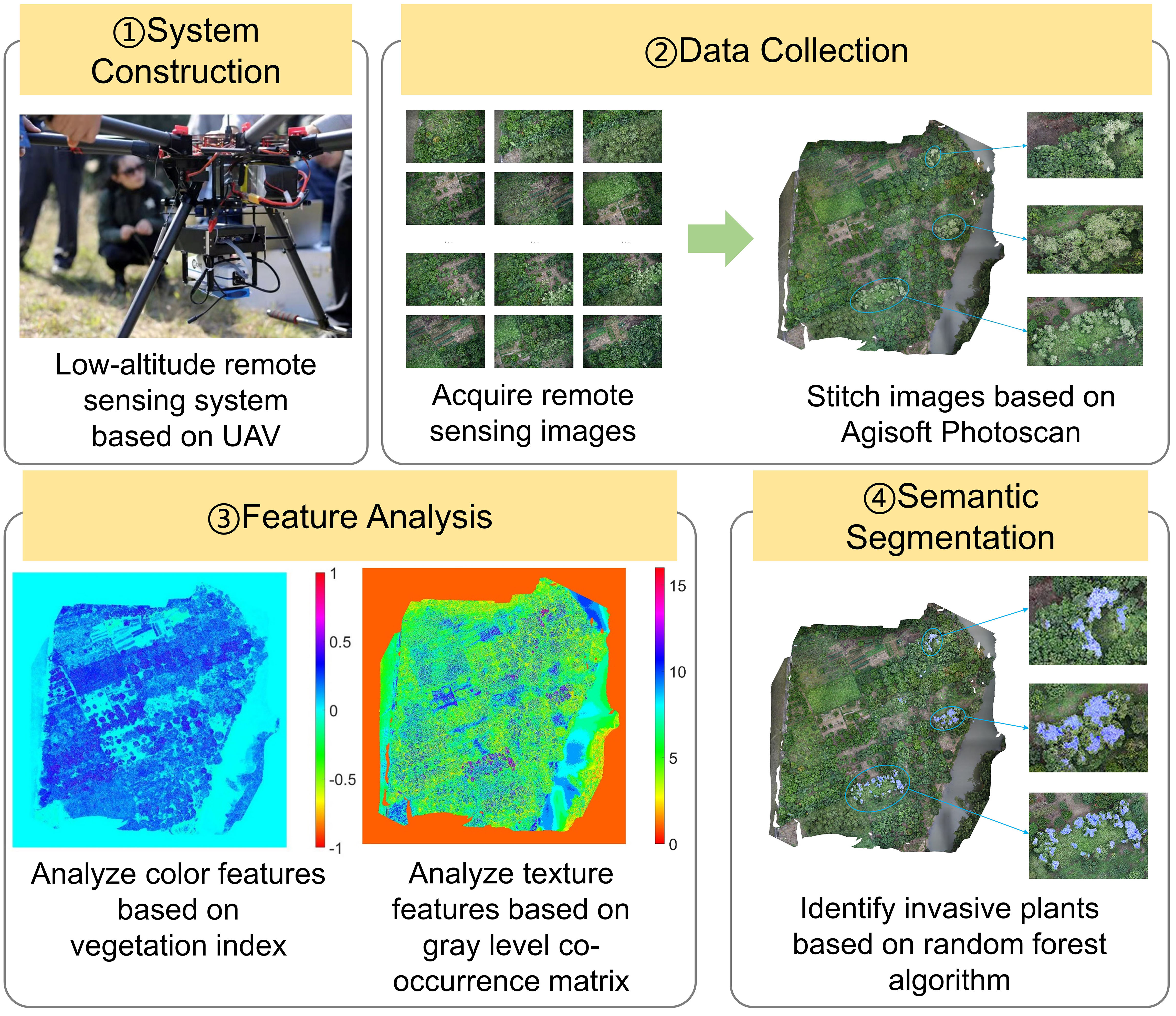
This project was supported by the National Natural Science Foundation of China, which is dedicated to the early discovery and continuous monitoring of Mikania Micrantha (an invasive plant).In this project, I am the core member of algorithm development and mainly responsible for feature analysis and semantic segmentation of remote sensing images.
🎓 Education
-
Ph.D., The University of Tokyo, 04/2025-now
-
M.Eng., China Agricultural University, 09/2021-06/2024
-
B.Eng., Guangxi University, 09/2017-06/2021
📝 Publications
-
One-shot domain adaptive real-time 3D obstacle detection in farmland based on semantic-geometry-intensity fusion strategy [Available online]
Tianhai Wang, Ning Wang, Jianxing Xiao, Yanlong Miao, Yifan Sun, Han Li, Man Zhang*
Computers and Electronics in Agriculture, 2023 (SCI, IF2022-2023=8.3, Special Report by WeChat Public Platform)
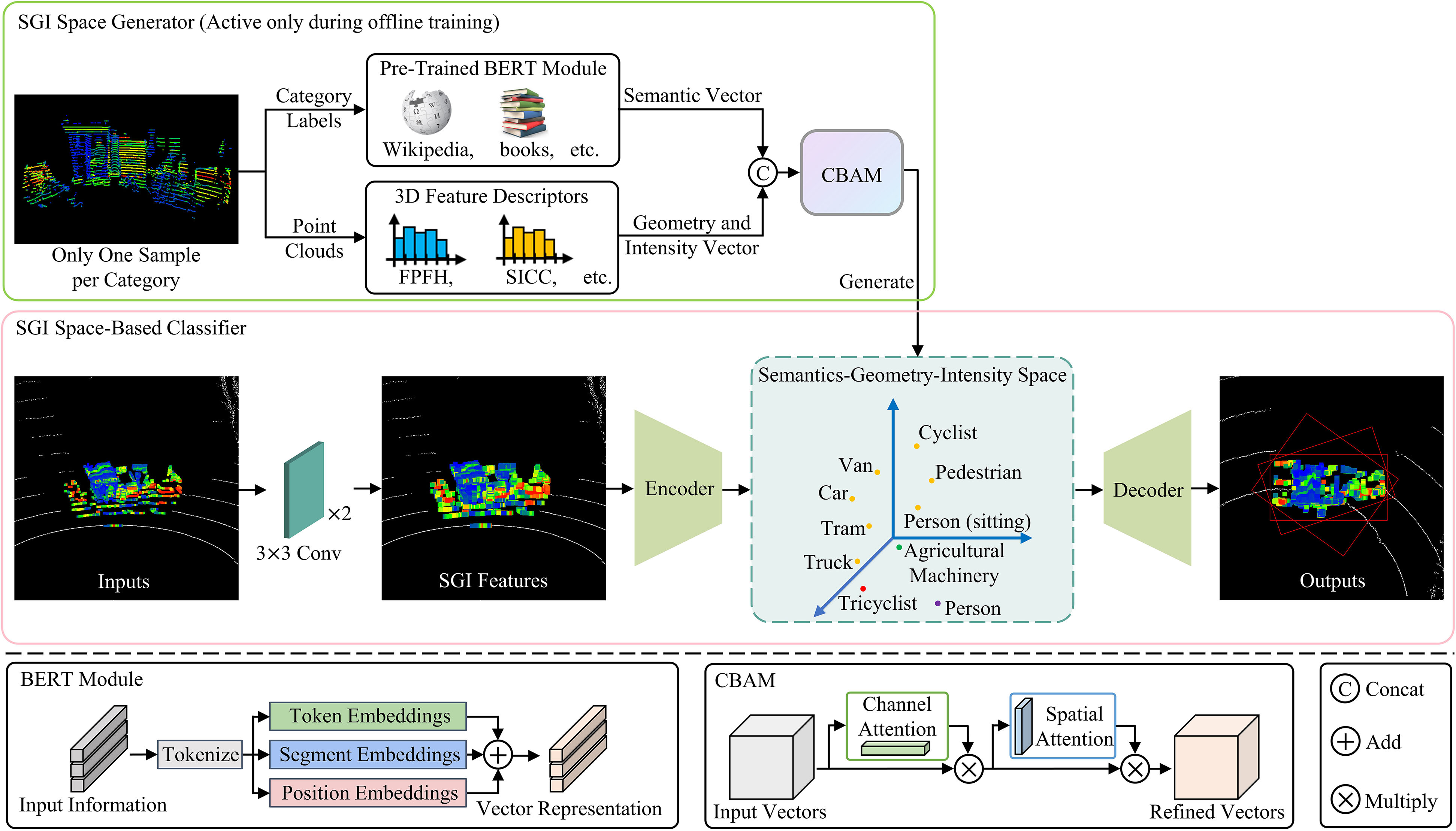
By introducing the concept of one-shot domain adaptation, the proposed method enables 3D obstacle detection with just one sample per category. By learning the intra-category similarity and inter-category difference, the dependence on the target domain dataset is transferred to the accessible source domain dataset, which enhances the generalization of the proposed method for different scenes and categories.
-
Zero-shot obstacle detection using panoramic vision in farmland [Available online]
Tianhai Wang, Bin Chen, Ning Wang, Yuhan Ji, Han Li, Man Zhang*
Journal of Field Robotics, 2023 (SCI, IF2022-2023=8.3, Special Report by WeChat Public Platform)
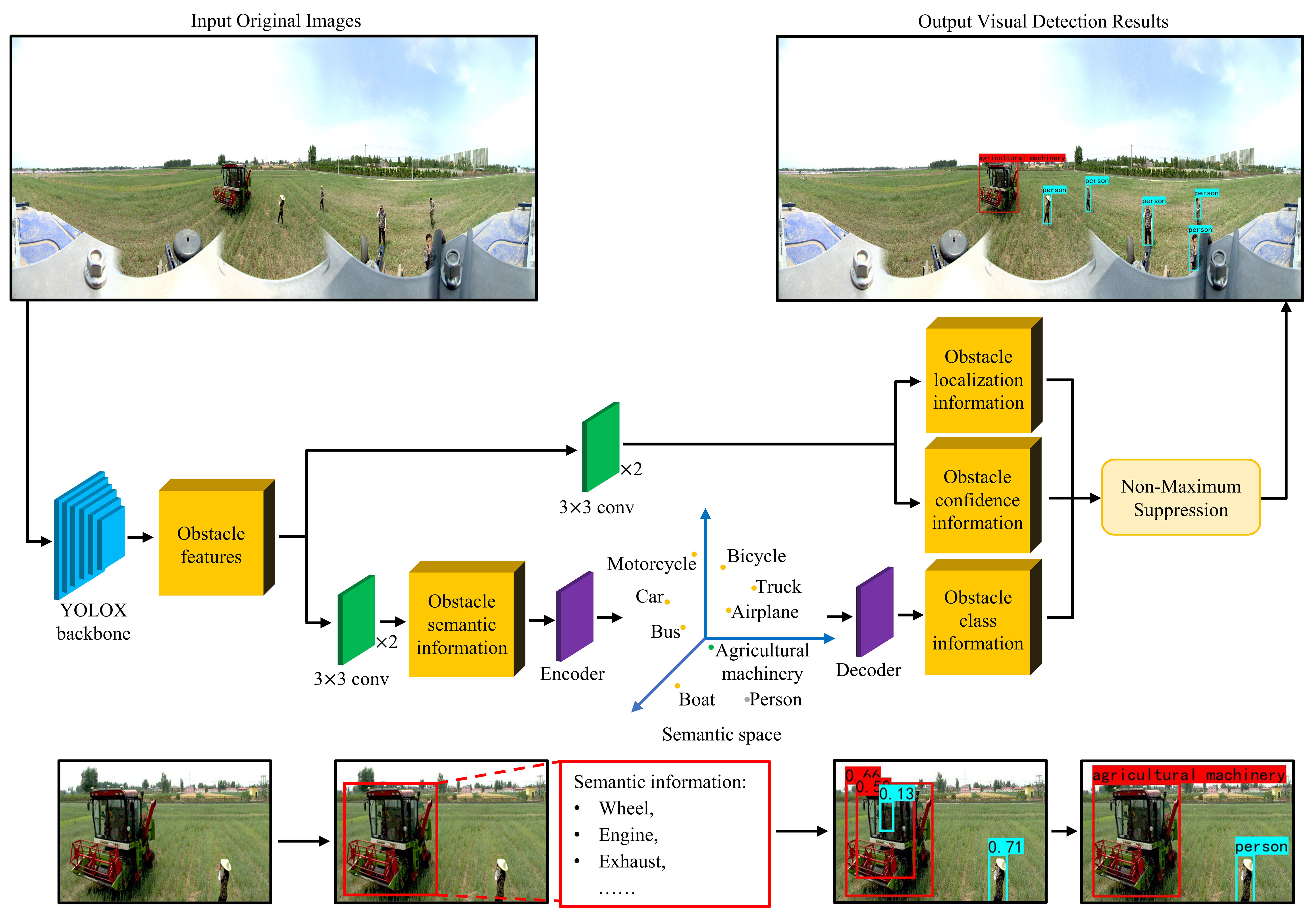
In the absence of annotated images, the current methods cannot perform optimally. Based on the visual‐semantic mapping relationship, the proposed model not only performs the correct classification of unseen obstacles, but also improves the detection performance of both seen and unseen obstacles.
-
An integrated solution for collaborative scheduling of heterogeneous agricultural machines of different types in harvesting-transportation scenarios [Available online]
Ning Wang, Zhiwen Jin, Man Zhang, Jianxing Xiao, Tianhai Wang, Qiang Sheng, Hao Wang, Han Li*
Information Processing in Agriculture, 2025 (SCI, IF2024-2025=7.4)
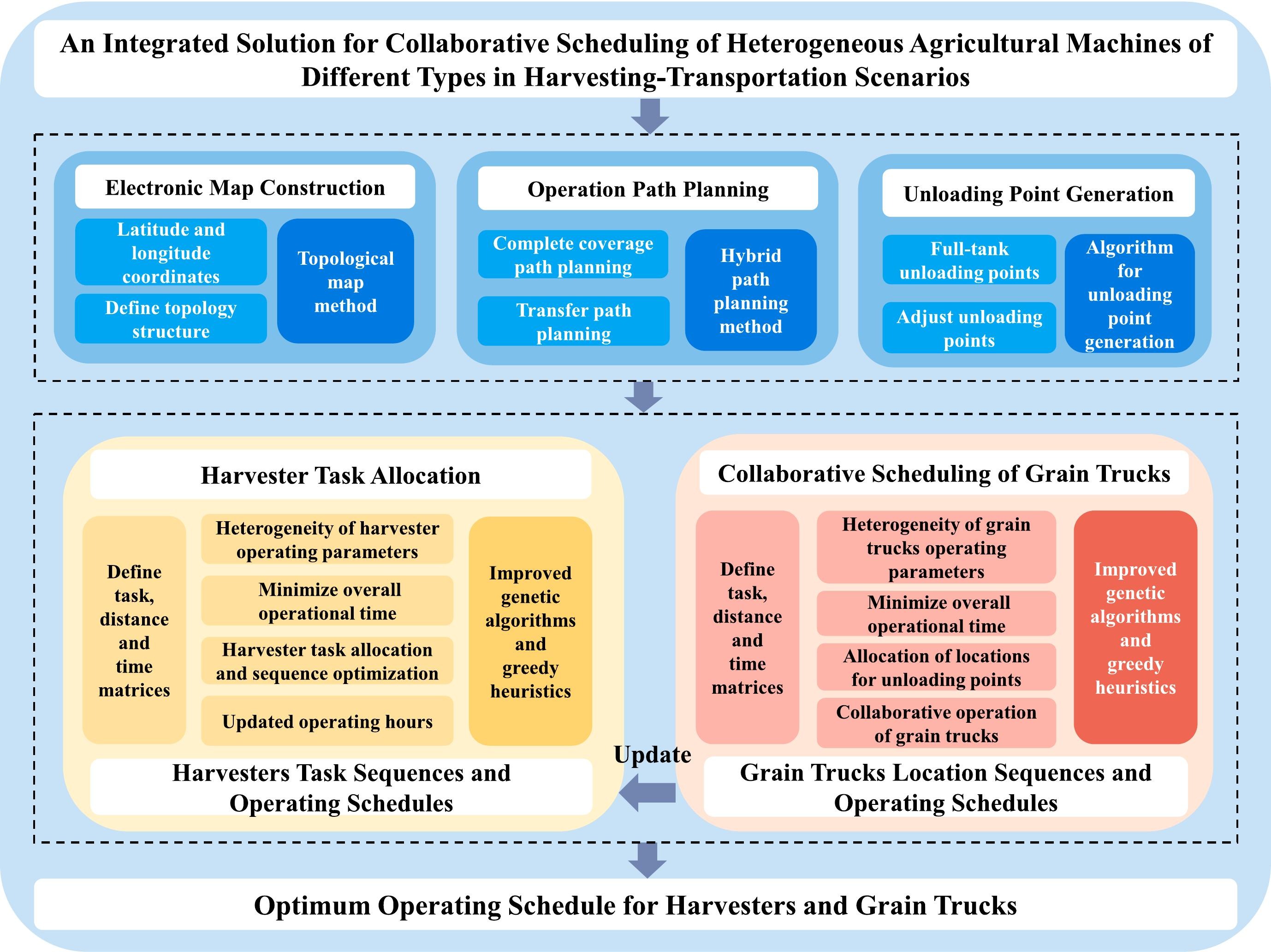
Efficient coordination of machinery fleets in regional farmland operations remains a significant challenge due to the lack of scientifically grounded scheduling management strategies, high modeling complexity, and elevated operational costs. This study proposed an integrated solution for collaborative scheduling of heterogeneous agricultural machines of different types, aiming to address the collaborative scheduling of harvesters and grain trucks in harvest-transport scenarios.
-
A collaborative scheduling and planning method for multiple machines in harvesting and transportation operations-Part Ⅰ: Harvester task allocation and sequence optimization [Available online]
-
A collaborative scheduling and planning method for multiple machines in harvesting and transportation operations-part Ⅱ: Scheduling and planning of harvesters and grain trucks [Available online]
Ning Wang, Shunda Li, Jianxing Xiao, Tianhai Wang, Yuxiao Han, Hao Wang, Man Zhang, Han Li*
Computers and Electronics in Agriculture, 2025 (SCI, IF2024-2025=8.9)
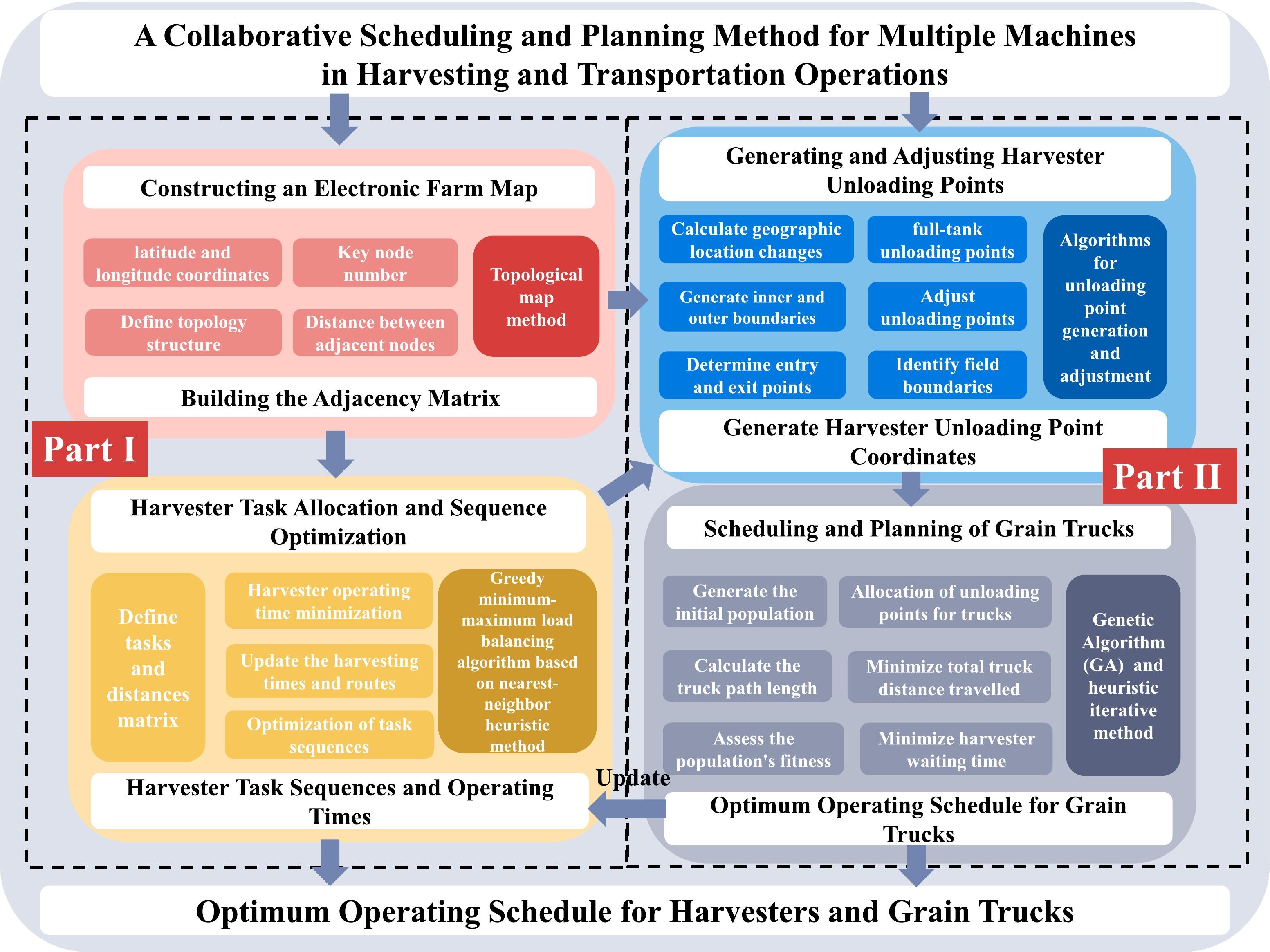
In Part Ⅰ of this two-part paper, the primary focus was to address the issue of collaborative scheduling for harvesters through task allocation and whole-process path planning. In Part II, the emphasis shifts to addressing the collaborative scheduling and planning of both harvesters and grain trucks while considering the efficiency of grain trucks.
-
Hybrid path planning methods for complete coverage in harvesting operation scenarios [Available online]
Ning Wang, Zhiwen Jin, Tianhai Wang, Jianxing Xiao, Zhang Zhao, Hao Wang, Man Zhang, Han Li*
Computers and Electronics in Agriculture, 2025 (SCI, IF2024-2025=8.9)
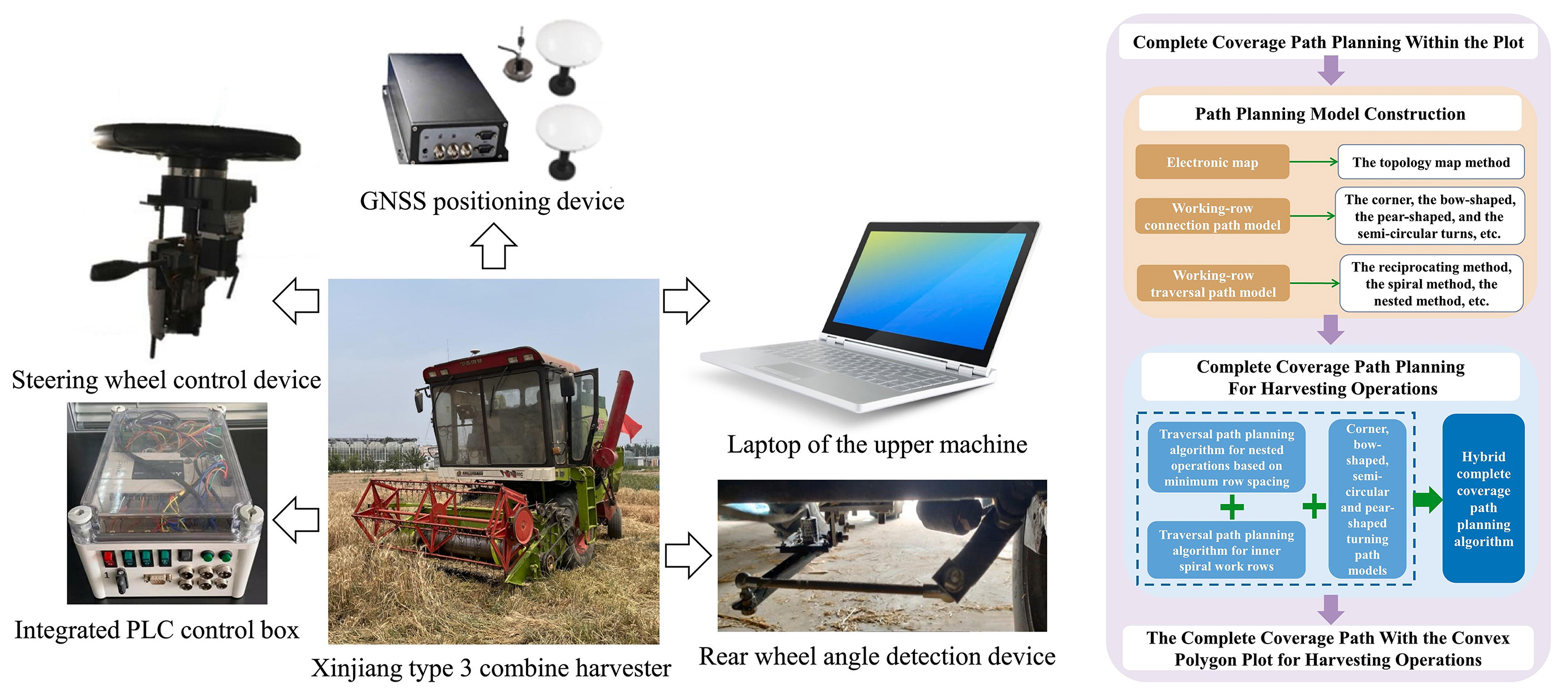
This study addresses the challenge of autonomous navigation path planning for achieving complete coverage operations using agricultural machines within harvest operation scenarios. We proposed a hybrid method mixing nested and spiral method to solve path planning problems for convex polygonal plots during harvest operations, focusing on the development of path planning models and complete coverage path planning (CCPP) method.
-
Collaborative path planning and task allocation for multiple agricultural machines [Available online]
Ning Wang, Xi Yang, Tianhai Wang, Jianxing Xiao, Man Zhang, Han Li*
Computers and Electronics in Agriculture, 2023 (SCI, IF2022-2023=8.3)
The farm’s electronic map was constructed using the topological map method. The improved Dijkstra algorithm based on priority queues was combined with three different complete coverage methods: the nested method, the reciprocating method, and the combination of nested and internal spiral path methods. To solve the problem of illogical scheduling of the same type of agricultural machines, an improved ant colony method was presented based on the whole working path to minimize the path cost.
-
Applications of machine vision in agricultural robot navigation: A review [Available online]
Tianhai Wang, Bin Chen, Zhenqian Zhang, Han Li, Man Zhang*
Computers and Electronics in Agriculture, 2022 (SCI, IF2022-2023=8.3, ESI Highly Cited Paper, Cited by 100+, Special Report by WeChat Public Platform)
-
Research Progress of Agricultural Robot Full Coverage Operation Planning [Available online]
Ning Wang, Yuxiao Han, Yaxuan Wang, Tianhai Wang, Man Zhang, Han Li*
Nongye Jixie Xuebao/Transactions of the Chinese Society of Agricultural Machinery, 2022 (EI)
-
Applications of UAS in Crop Biomass Monitoring: A Review [Available online]
Tianhai Wang, Yadong Liu, Minghui Wang, Qing Fan, Hongkun Tian, Xi Qiao*, Yanzhou Li*
Frontiers in Plant Science, 2021 (SCI, IF2021-2022=6.627)
-
Computer vision technology in agricultural automation —A review [Available online]
Hongkun Tian, Tianhai Wang, Yadong Liu, Xi Qiao*, Yanzhou Li*
Information Processing in Agriculture, 2020 (EI, Cited by 500+)
💬 Presentations
-
Tianhai Wang (Presenter), Haozhou Wang, James Burridge, Wei Guo*. An Unsupervised 3D Point Cloud Segmentation Method and Tool for Artificial Objects and Trees in Dense Orchards. Seventh International Workshop on Machine Learning for Cyber-Agricultural Systems (MLCAS2025). Tokyo. August 2025. (Oral Presentation)
-
Tianhai Wang (Presenter), Ning Wang, Jianxing Xiao, Han Li, Man Zhang*. One-shot domain adaptive obstacle detection based on semantic-geometry-intensity fusion representation. 2023 Annual Academic Conference of Chinese Society of Agricultural Engineering (CSAE2023). Chengdu. August 2023. (Oral and Poster Presentation)
🧾 Funding
- 05/2025-03/2026, The University of Tokyo SPRING GX Self-Directed and Integrated Project Research (Leader, JPY 1,000,000, URL)
- 04/2025-03/2028, JST Support for Pioneering Research Initiated by the Next Generation (SPRING) Program, The University of Tokyo “Advanced Human Resource Development Leading Green Transformation (GX) (SPRING GX)” Project (Leader, JPY 1,080,000, URL)
- 05/2019-08/2020, China National University Student Innovation & Entrepreneurship Development Program (Leader, Excellent Final Assessment, JPY 200,000, URL)
🏅 Honors and Awards
Honors
- 06/2024, Outstanding Master Thesis of China Agricultural University (Only one master graduate in my college that year, Special Report by University)
- 05/2024, Honorary title of “Outstanding Graduate” of China Agricultural University
- 12/2023, National Scholarship of China (The highest-level scholarship awarded by the Chinese government for top 0.2% students)
- 11/2023, First Class Scholarship for Postgraduate of China Agricultural University
- 06/2023, Honorary title of “Outstanding Postgraduate Teaching Assistant” of China Agricultural University
- 11/2022, First Class Scholarship for Postgraduate of China Agricultural University
- 06/2021, Honorary title of “Outstanding Graduate” of Guangxi University
- 05/2021, Outstanding Bachelor Thesis of Guangxi University
- 12/2020, National Encouragement Scholarship of China
- 12/2019, Honorary title of “Outstanding Undergraduate” of Guangxi University
- 12/2019, National Encouragement Scholarship of China
Competition Awards
- 04/2020, Guangxi College Students Innovation Design and Production Competition, Ministerial 3rd Prize
- 12/2019, National College Students Intelligent Agricultural Equipment Innovation Competition, National 2nd Prize
- 11/2019, China College Students “Internet+” Innovation and Entrepreneurship Competition in Guangxi Division, Ministerial Bronze Medal
- 10/2019, National 3D lnnovative Design Annual Competition in Guangxi Division, Ministerial 2nd Prize
- 07/2019, National University Students Electrical Math Modeling Competition, National 3rd Prize
- 07/2019, National 3D lnnovative Design Elite Competition in Guangxi Division, Ministerial 2nd Prize
- 06/2019, China University Robot Competition ROBOCON, National 3rd Prize
- 06/2018, National College Students Mechanical Innovation Design Competition in Guangxi Division, Ministerial 3rd Prize
💪 Skills
- Programming
- Python, Matlab, Simulink, C, C++
- Framework
- PyTorch, Robot Operating System (ROS)
- 2D/3D Modeling
- AutoCAD, Unigraphics NX, SolidWorks
- Language
- Chinese
- English
👔 Service
- Research Assistant, College of Information and Electronic Engineering, China Agricultural University
- Student Member, Chinese Society of Agricultural Engineering
- Teaching Assistant, Fall 2022&2023 Intelligent Guidance Technology Course (Special Report by College)